
With all the existing options on the market to control DC motors, collect inputs, drive outputs, power the whole thing in a standard 5 volts, you would think to controlling a 4WD model car chassis is a no-brainer. Well, I must be missing something.
Here's what we have so far :
- A 4 wheel drive car chassis, with 4 DC motors that require around 250 mA each.
- A Raspberry Pi B+, requiring a stable 5V 700 mA.
- A dual-USB output battery packing 6600 mAh and a dual 2 A / 1 A power outlet.
... But no convenient way to connect it all.
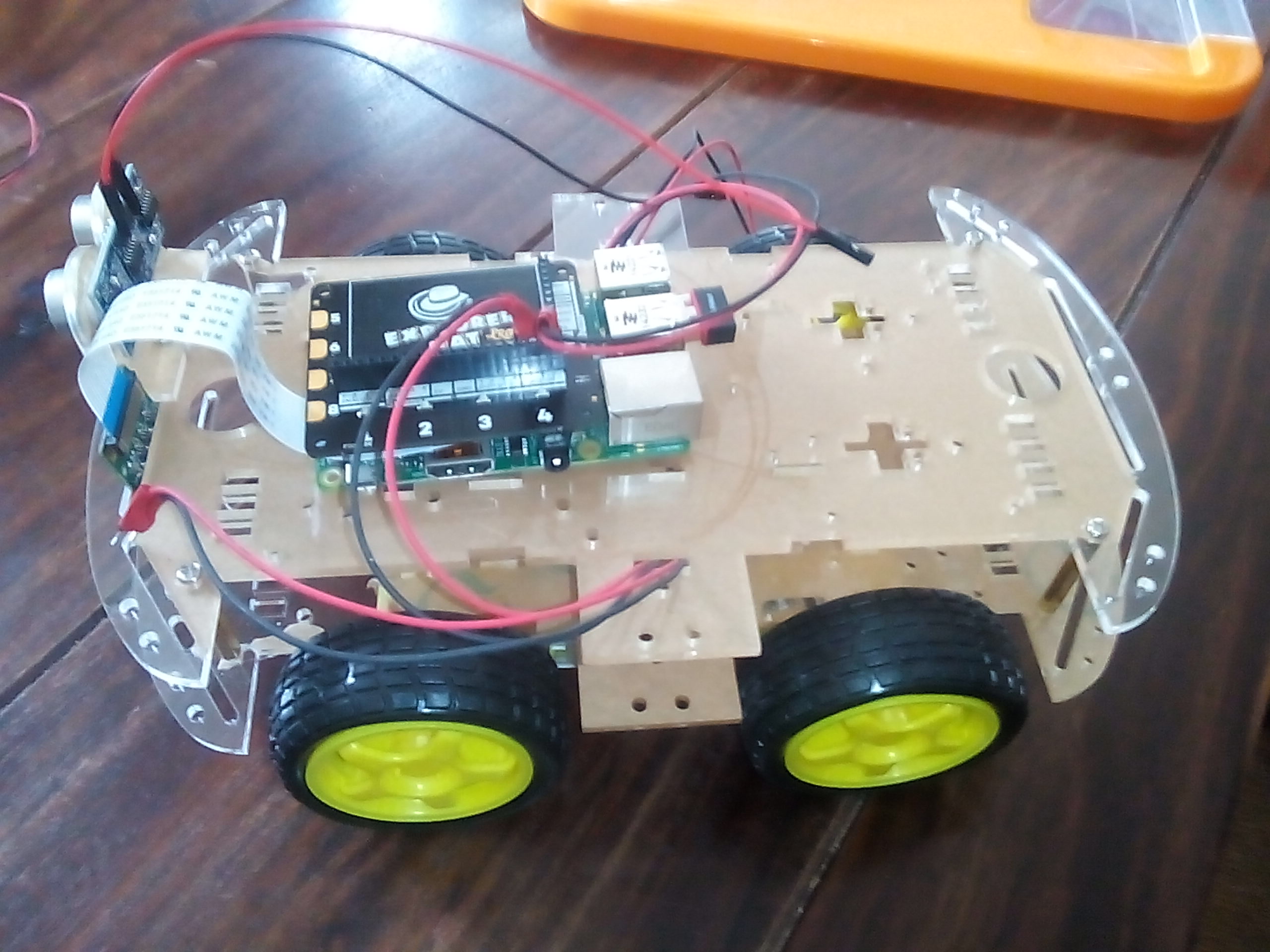
The Pimoroni Pibrella, although adequately powered independently and able to drive the four motors, can only do so in a single direction (no H-Bridge). The Pimoroni Explorer Pro (picture above) can certainly power four motors, but only going in the same direction - trying to reverse direction on one set of wheels (essential to change direction with precision) will not work. We could certainly go ahead with a simpler chassis and only two motors (using a freely moving wheel at the front), which is what the Explorer Pro HAT is really designed for. But we would lose a lot of precision in the movement, as well as the capacity to evolve on difficult terrain.
Ideally, a simple board that would exhibit :
- Two H-Bridge outputs, powered separately from the Raspberry Pi and capable of driving 2 motors each (2 x 250 mA).
- A ground, 3.3V and 5V individually powered slots.
- Two digital 5V outputs.
- Two digital protected 5V inputs.
... would be enough to drive the four motors, collect input from two ultrasonic sensors and power a small LED array or an LCD screen.
Any takers ?